移動機器人(AMR)控制系統(tǒng)簡介
AMR(Autonomous Mobile Robot)���,全稱為自主移動機器人�,是集環(huán)境感知��,動態(tài)決策規(guī)劃,行為控制與執(zhí)行等多功能于一體的綜合系統(tǒng)�。冠超科技自主研發(fā)的AMR控制系統(tǒng)V2.0應用軟件,采用分布式架構(gòu)進行整體設(shè)計�����。分布式子系統(tǒng)主要包括導航系統(tǒng)����、感知系統(tǒng)、底盤系統(tǒng)��、執(zhí)行系統(tǒng)�、決策系統(tǒng)、信號I/O系統(tǒng)�,各子系統(tǒng)有機結(jié)合實現(xiàn)AMR自主完成各種運載任務,實現(xiàn)真正意義上的無人智能化“搬運-倉儲”現(xiàn)代工廠�����。決策系統(tǒng)作為AMR對上級系統(tǒng)交互的接口�,通過MQTT消息隊列遙傳協(xié)議與智能設(shè)備管控平臺(ACS)實現(xiàn)上下任務、交通和狀態(tài)的信息交互�。

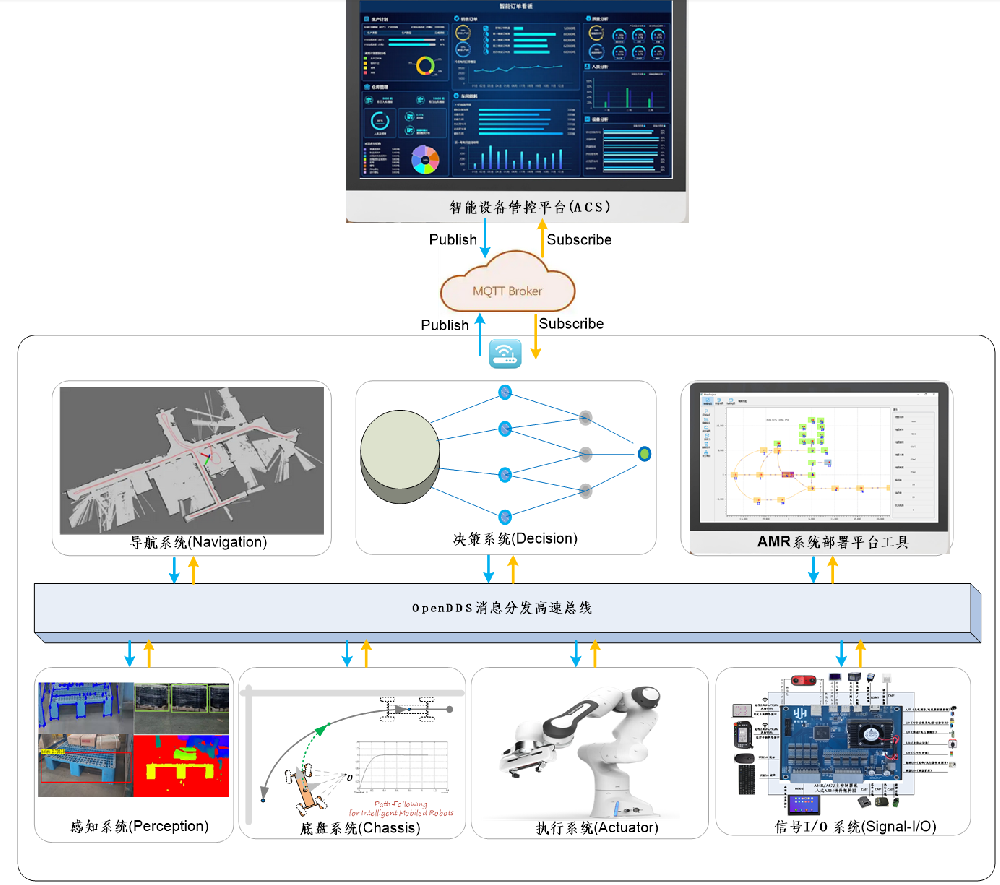
圖1 移動機器人控制系統(tǒng)架構(gòu)圖
AMR控制系統(tǒng)采用分布式布局,各子系統(tǒng)之間通過消數(shù)據(jù)息分發(fā)協(xié)議OpenDDS實現(xiàn)各自消息主題的發(fā)布和接收,極大的降低了系統(tǒng)之間的耦合性��,減少了各子系統(tǒng)單獨可維護難度����,提高了AMR控制系統(tǒng)可擴展特性���。各子系統(tǒng)功能簡要介紹如下:
決策系統(tǒng)(Decision):決策系統(tǒng)作為AMR控制系統(tǒng)的中心����,相當于機器人控制系統(tǒng)的大腦�。決策系統(tǒng)根據(jù)外界環(huán)境感知信息和上層智能設(shè)備管控平臺系統(tǒng)發(fā)布的任務和交通行為控制指令,在協(xié)調(diào)和監(jiān)控機器人各子系統(tǒng)的基礎(chǔ)上����,完成上層系統(tǒng)下發(fā)的各類任務。

圖2 AMR機器人決策系統(tǒng)功能
導航系統(tǒng)(Navigation):導航系統(tǒng)結(jié)合自身構(gòu)建的輪廓地圖和導航標志參考物��,對AMR自身所處工廠實時位置進行精確定位計算����,為底盤系統(tǒng)、執(zhí)行系統(tǒng)及決策系統(tǒng)提供AMR實時位姿�����。

圖3 AMR機器人支持的導航方式
感知系統(tǒng)(Perception):感知系統(tǒng)實時檢測AMR周圍環(huán)境信息,進行包括貨物感知和位姿計算��、工廠各類移動設(shè)備感知及空間計算�、貨位貨物感知及空間位置計算、行人檢測及提示等任務����。作為AMR控制系統(tǒng)提供環(huán)境理解的重要組成部分,為底盤系統(tǒng)�����、執(zhí)行系統(tǒng)���、決策系統(tǒng)提供環(huán)境數(shù)據(jù)支撐和參考����。

圖4 AMR機器人視覺感知系統(tǒng)
底盤系統(tǒng)(Chassis):底盤系統(tǒng)接收決策系統(tǒng)發(fā)布的任務和交通指令�����,接收導航系統(tǒng)發(fā)布的AMR空間實時位姿��,同時結(jié)合環(huán)境感知系統(tǒng)發(fā)布的空間目標感知結(jié)果,在與執(zhí)行系統(tǒng)協(xié)同工作的基礎(chǔ)上實現(xiàn)對貨物的安全高效物流運輸�����。目前支持差速驅(qū)動�、單舵輪驅(qū)動����、雙舵輪萬向移動、四舵輪萬向移動等底盤類型���。

圖5 AMR機器人系統(tǒng)支持的底盤類型
執(zhí)行系統(tǒng)(Actuator):執(zhí)行系統(tǒng)接收決策系統(tǒng)發(fā)布的任務����,根據(jù)底盤系統(tǒng)實時轉(zhuǎn)運貨物情況�����,在任務路徑上的合適位置進行相應的取放貨準備���、取放貨動作執(zhí)行��,將貨物安全準確的放置到指定的目標位置���。執(zhí)行系統(tǒng)根據(jù)不同的機器人夾具動作類型�、機構(gòu)數(shù)量�、先后動作順序,將各動作進行配置化以實現(xiàn)不同機構(gòu)運動模型的執(zhí)行機構(gòu)控制���。

圖6 AMR機器人系統(tǒng)支持的執(zhí)行系統(tǒng)類型
信號系統(tǒng)(Signal-I/O):信號I/O系統(tǒng)根據(jù)配置的系統(tǒng)功能和對應端口�,采集AMR相應的傳感器信息����,將其整合并分類成其余各子系統(tǒng)所需的功能信號;同時�����,將其余各子系統(tǒng)的功能輸出信號轉(zhuǎn)換成驅(qū)動器和各類設(shè)備的信號輸出����。

圖7 AMR機器人系統(tǒng)信號處理流程
AMR部署平臺工具:為方便客戶方便快捷部署移動機器人控制系統(tǒng),開發(fā)機器人部署平臺工具����。平臺工具整合了包括導航地圖構(gòu)建、路徑繪制���、子系統(tǒng)模型配置���、子系統(tǒng)狀態(tài)監(jiān)控�、系統(tǒng)任務測試及記錄����、各傳感器參數(shù)標定等一系列插件工具,同時提供了良好的人機交互界面便于快速理解和操作����,整體提高項目現(xiàn)場機器人控制系統(tǒng)部署效率��。

圖8 車體結(jié)構(gòu)參數(shù)可視化配置

圖9 執(zhí)行系統(tǒng)動作鏈流程配置

圖10 子系統(tǒng)可視化監(jiān)控

圖11 地圖和路徑創(chuàng)建