AMR/AGV作為智能工廠中所需的移動設備�����,其機械結(jié)構(gòu)�����、傳感器型號及布局等隨應用場景及工藝的不同而發(fā)生變化�。為快速配置不同結(jié)構(gòu)、不同傳感器布置的AMR/AGV參數(shù)化模型以適應需求��,設計了一種可視化的機器人模型配置界面�����。其步驟和流程如下所示:
1.主界面模型配置
右鍵點擊主界面編輯使能按鈕��,可將主頁面切換為模型編輯頁面���。
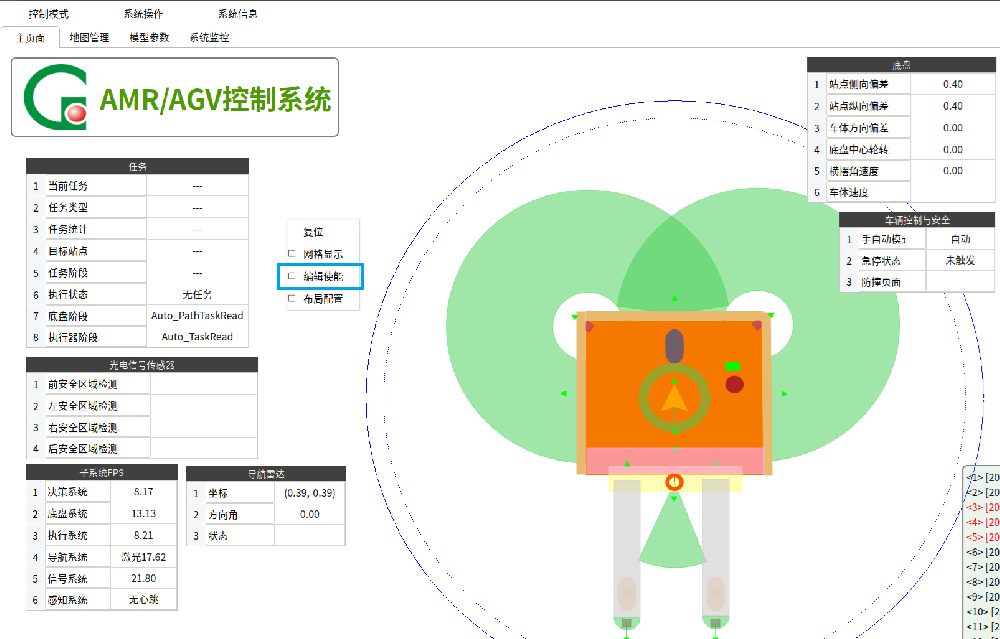
配置頁面由左向右依次顯示為模型構(gòu)建編輯欄、模型編輯樹�����、模型畫板、模型屬性編輯��;編輯欄可進行模型保存��、模型另存為�����、模型加載����、清空、模型推送����、模型拉取�;模型編輯樹使用勾選方式在畫板上添加相應的模型圖形;模型畫板顯示已勾選的相應模型���,并在畫板上拖動相應位置形成具體的AMR模型���;屬性編輯欄可通過點擊模型或模型樹勾選選項顯示對應得基礎模型屬性或特有的模型屬性�����。

2.模型創(chuàng)建
2.1 模型名輸入
在模型樹上方可修改當前模型文件名�����,加載文件后顯示當前加載的模型文件名��,右方箭頭可展開或閉合模型樹所有項�;
(1)構(gòu)建新模型需要將原先顯示的模型清空�,點擊模型工具欄清空按鈕,可清空當前加載模型���;

(2)構(gòu)建完成后點擊模型保存�,模型文件將自動保存到默認目錄下"/file/HMI/RobotModel",點擊另存為可自由選擇模型保存目錄�;
(3)軟件啟動后將默認加載最后一次加載的模型文件,點擊模型加載切換當前加載的模型配置文件���。
2.2 模型構(gòu)建
模型構(gòu)建方式采用勾選的方式搭建AMR模型,勾選相應的模型項�����,對應得圖形將在畫板上顯示,如勾選底盤ChassisModel1界面顯示如圖���,取消勾選則會刪除顯示的模型圖形和相關(guān)配置信息:
(1)底盤模型
底盤ChassisModel:默認提供兩個模型ChassisModel1和ChassisModel2,模型以方形(橙色矩形)表示����;勾選即可顯示�����,如下圖所示�����。

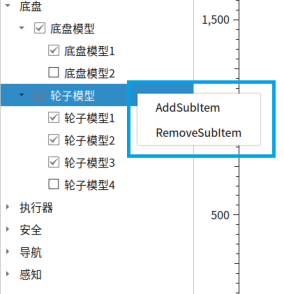
輪子WheelModel:默認提供三個���,可通過右鍵菜單怎加和刪除���,如下圖所示;

右鍵菜單:AddSubItem 點擊增加一個子模型�;RemoveSubItem 點擊刪除一個子模型,若模型為勾選狀態(tài)則無法刪除���,如下圖所示�����。
(2)執(zhí)行機構(gòu)模型
a. 托盤頂升機構(gòu):用于kiva車型的舉重托盤模型���,如圖拖動綠色箭頭可旋轉(zhuǎn)����,如下圖所示�;

b. 貨叉結(jié)構(gòu):
用于可視化顯示貨叉的位置、間距��,門架支架的位置等�����,如下圖所示���。

(3) 安全模型
a. 安全雷達:AMR檢測障礙物的雷達模型��,可配置模型顯示掃描范圍和掃描方向����,如下圖所示,拖動綠色箭頭可旋轉(zhuǎn)��;
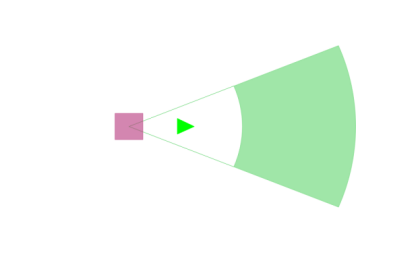
b. 安全光電:模型同安全雷達
c. 防撞條:安裝在車體邊緣的碰撞傳感器����,可配置一個或多個�,如圖,拖動綠色箭頭可旋轉(zhuǎn)���,如下圖所示����;
d. 燈光�����,語音:用于提示車輛狀態(tài)的設備模型�,如下圖所示:

(4)導航模型
勾選導航模型選項生成導航圖形,導航模塊統(tǒng)一抽象成一種模型類型�����,拖動綠色箭頭可旋轉(zhuǎn)��,如下圖所示:
導航模塊支持類型如下:激光SLAM、二維碼�����、反射板�����、RTK��。
(5)感知模型
勾選感知模型選項可生成感知模型����,感知模塊使用同一種抽象模型表示,如下圖所示����,拖動綠色箭頭可旋轉(zhuǎn);

目前支持設備如下:相機
2.3 屬性配置
(1)礎屬性:每個模型都具有基礎配置屬性����,點擊畫板上模型圖形,右側(cè)屬性頁面將會顯示基礎屬性配置���,如下圖所示:

① id :顯示當前模型id���,每個模型都配有唯一的模型id����;② 坐標x,y,z:模型相對于車體坐標系的位置坐標方位����;③ 旋轉(zhuǎn)坐標:模型旋轉(zhuǎn)的坐標點����,一般與模型的x,y坐標相同;
④ 尺寸:length���、width�����、height 表示模型的長寬高��;angle:配置模型旋轉(zhuǎn)角度
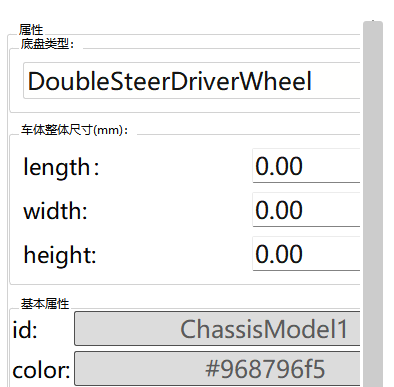
(2)底盤結(jié)構(gòu)配置點擊底盤標簽Chassis���,屬性配置頁面顯示底盤類型配置。
配置類型為:SingleSteerDriverWheel單舵機底盤�����、DoubleSteerDriverWheel雙舵機底盤、DifferentialWheel差速驅(qū)動底盤��;如下圖所示:
輪子配置:點擊配置的輪子模型圖形��,屬性頁面顯示輪子的特殊屬性配置�,如下圖所示:

輪子類型:分為驅(qū)動輪和從動輪;
安裝方位:選擇安裝位置���,前后左右��,前左前右���,后左后右。
(3)執(zhí)行器結(jié)構(gòu)
主屬性:點擊Actuator標簽����,屬性頁面顯示執(zhí)行器主要屬性配置;如下圖所示:
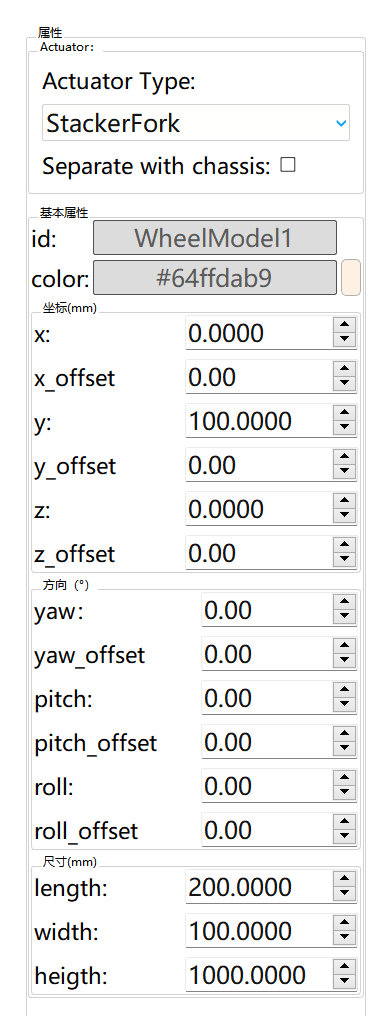
① ActuatorType :執(zhí)行器類型�、StackerFork-堆高車、ThreeWayFork—三向叉����、FrontFork—前移���、BalancePinch—抱夾平衡重、LiftUpPallet--頂升托盤�����、MechanicalArm--機械臂
② SeparateWithChassis:該項勾選則使執(zhí)行器和底盤分離�����,在取放貨時底盤不可到達工作站點�,只允許貨叉到達工作站點�����。
③ Enable Arrived:使能各個動作是否使用到達限位如貨物到位���,上升到位下降到位等��。
(4)安全傳感器
a. 安全雷達屬性:點擊SafetyRadar標簽���,屬性頁面顯示安全雷達屬性配置,可配置車體在不同安全區(qū)域速度�,分為綠色區(qū)域��,黃色區(qū)域和紅色區(qū)域�����;如下圖所示:

b. 安全雷達圖形屬性配置���,可配置雷達安裝位置,掃描范圍���,和掃描最大距離與最小距離����,僅用于顯示�,如下圖所示;

c. 防撞條���,語音�,燈光均無特殊配置����。
(5)導航傳感器
a. SLAM:點擊SLAM標簽屬性頁面顯示SLAM配置,可配置連接網(wǎng)絡ip和端口號,實際的物理安裝偏差����,SLAM導航類型,并按回車確認����;如下圖所示:

b. QRCode:屬性配置同SLAM導航;
c. Reflector:屬性配置同SLAM導航����;
d. RTK:屬性配置同SLAM導航;
(6)感知傳感器
a. Camera :點擊具體的Camera標簽如Camera1���;屬性頁面顯示相機配置參數(shù)頁面;如圖所示�。
b. 連接類型:配置連接方式為USB或NetWork,如果選中Network需要配置連接ip和端口號�;如下圖所示:

綜上所述,通過上述的可視化參數(shù)模型配置��,最終保存的配置文件所處文件夾位置如下圖所示:

保存的機器人配置文件內(nèi)容局部如下所示:

其余子系統(tǒng)根據(jù)合適時機調(diào)用上述配置文件對其參數(shù)進行實時更新配置�����。